

Author: Bokang Zhang, Chenhao Huang
Post Summary:
Nowadays, many Database-as-a-Service (DBaaS) solutions separate the computation layer and the storage layer. These include, for example, Amazon Aurora and Google BigQuery. This solution is attractive, as the data storage and data replication can be handled by existing services. DBaaS takes off the need to worry about this complexity; however, the performance of this design sometimes may not be as good as the traditional ways – using a local disk as storage.
In this blog, we show that with a careful selection of Elastic Block Store (EBS) types and clever optimizations, deploying DBaaS on EBS can achieve even better performance than on local disks.
Why do we consider EBS in the first place?
To explain our motivation for using EBS, we’d like to briefly introduce TiDB. TiDB is a MySQL-compatible, distributed database. TiDB Servers are the computation nodes, which process SQL requests. The Placement Driver (PD) is the brain for TiDB, which configures load balancing and provides metadata services. TiKV is a row-oriented key-value store that processes transactional queries. TiFlash is a columnar storage extension that handles analytical queries. In this blog, we focus on TiKV.
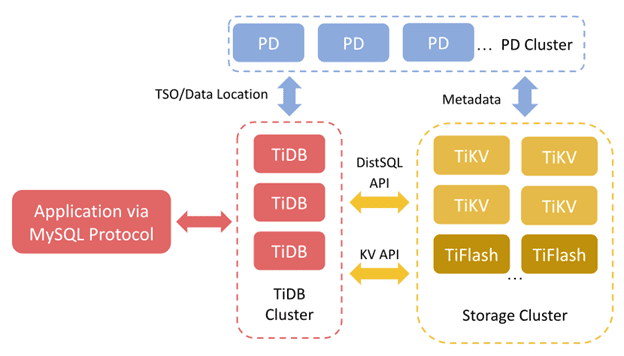
TiKV provides distributed key-value service. First, it splits the data into several Regions, the smallest data unit for replication and load balancing. To achieve High Availability (HA), each Region is replicated three times and then distributed among different TiKV nodes. The replicas for one Region form a Raft group. Losing one node, and thus losing one replica in some Regions is acceptable for TiDB. However, losing two replicas simultaneously causes problems, because the majority of members of a Raft group are lost. This makes a Region unavailable; its data can no longer be accessed. Human intervention is needed to address such issues.
When deploying TiDB Cloud, we have placement rules, which guarantee that the replica of a Region will be spread across multiple Availability Zones (AZ). Losing one Availability Zone (AZ) will not have a huge impact on TiDB Cloud. However, with AZ + 1 failure (one Availability Zone and at least one node failure in another Availability Zone) the Region becomes unavailable. We had such a failure in production, and it took a lot of work to bring the TiDB cluster online. To avoid such painful experiences again, EBS comes into our sight.
AWS Elastic Block Store (EBS) is a Block Store service provided by AWS, which can be attached to EC2 instances. The data on EBS, however, are independent of the EC2 instance, so when an EC2 instance fails, the data persists. When an EC2 instance fails, the EBS can be automatically remounted to a working EC2 instance by using Kubernetes. Moreover, EBS volumes are designed for mission-critical systems, so they are replicated within an AZ. This means that EBS are less likely to fail, which gives us extra peace of mind.
Selecting a suitable EBS volume type
In general, there are four SSD-based EBS volume types: gp2, gp3, io1, and io2. (When we designed and implemented TiDB Cloud, io2 Block Express was still in preview mode, so we didn’t consider it.) The following table summarizes the characteristics of these volume types.
| Volume type | Durability (%) | Bandwidth (MB/s) | IOPS (per GB) | Cost | Comments |
| gp2 | 99.8-99.9 | 250 | 3, burstable | Low | A general purpose volume |
| gp3 | 99.8-99.9 | 125-1,000 | 3,000- 16,000 | Low | A general purpose volume with flexible bandwidth |
| io1 | 99.8-99.9 | Up to 1,000 | Up to 64,000 | High | High IOPS |
| io2 | 99.999 | Up to 1,000 | up to 64,000 | High | High IOPS; the best performance of the group |
Now, let’s get our hands dirty and do some performance comparison. Note that in the following figures, the four EBS volume types are attached to the r5b instance, while the measurements on local disk are conducted on the i3 instance. This is because that r5b instance can only use EBS. We use i3 as a close alternative. Each figure shows the average and 99th percentile latency for all operations.
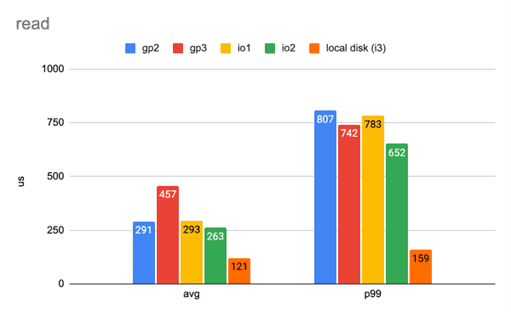
We’ll start with benchmarking the read and write latency. The first workload is a simple one. It has 1,000 IOPS, and each I/O is 4 KB. The following two figures show the average and 99-percentile latency.
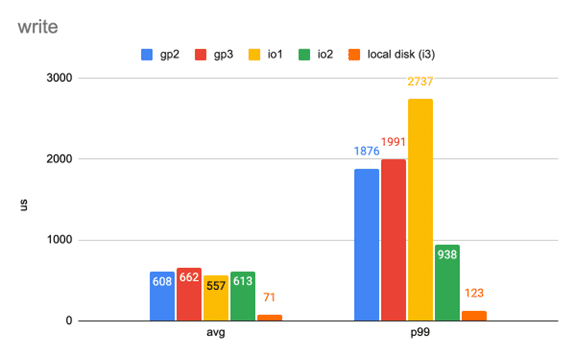
Write latency in a simple workload with one thread. (Lower numbers are better)
Read latency in a simple workload with one thread. (Lower numbers are better)
We conducted a similar workload with similar settings. This time we use eight threads to give the disk 3,000 IOPS in total, and each I/O is still 4 KB. Again, we summarize the average and 99-percentile latency and plot it in the following two figures.
Write latency in a simple workload with eight threads. (Lower numbers are better)
Read latency in a simple workload with eight threads. (Lower numbers are better)
From the previous two experiments, it seems like that the local disk is the winning storage. Is that the case? Here is another benchmark which shows a slightly different story. We designed a mixed workload to simulate TiKV IO usage: there are small sequential writes to simulate foreground Write Ahead Log (WAL) writes, and there are large sequential writes to simulate compaction write. (Recall that TiDB uses RocksDB as its storage engine. RocksDB is based on Log-structured Merge-Tree (LSM tree), which periodically compacts the latest written data.) We also have small random reads to mimic foreground reads.
We found that when the background I/O becomes more intense, foreground latency grows, and the latency gap between the local disk and the EBS becomes smaller. See the following figure.
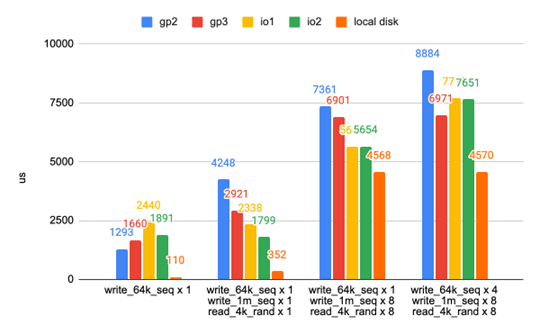
Average operation latency in some comprehensive workloads. (Lower numbers are better)
The performance gap between EBS and local disk becomes even smaller, when we run the TPC-C workload against TiDB, which is a more comprehensive benchmark. The following figures show the results. The TiDB version used is v5.0.0. We deployed three TiKV nodes either on r5b.2xlarge instance with various EBS volume types, or on i3.2xlarge instance with local nvme disk. The TiDB node, the Placement Driver (PD), and the TPC-C client are deployed on the c5.4xlarge instance. We used 5,000 warehouses (around 350 GB data) in our experiments, with 50, 200, and 800 clients. The results are shown in the following 3 figures. The first figure shows transactions per minute (TPMC) in TPC-C. The second figure shows the average latency of the transactions in milliseconds. The third figure shows the 99-percentile latency in milliseconds.
Transaction per minute (TPMC) in TPC-C workload. (Higher numbers are better)
Average operation latency (ms) in TPC-C workload. (Lower numbers are better)
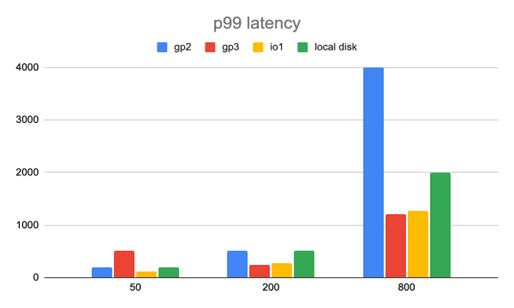
99-percentile operation latency (ms) in TPC-C workload. (Lower numbers are better)
In general, we can see that the instances with EBS can achieve a performance similar to the ones with local disks, and sometimes even better. This is because TiKV is CPU bounded in this workload (and in many other benchmarks we have tried as well). I/O performance is not the bottleneck. Since the instance type with EBS is r5b, which has a better CPU than i3, the instance type with local disks, the performance results look similar or even better.
Also, in the third figure (99-percentile operation latency in TPC-C workload), when there are 800 threads, the 99-percentile latency with EBS volume type gp2 skyrockets. This is because with gp2 the bandwidth reaches the limit.
To conclude, we chose gp3 as our EBS type. The EBS volume io2 was out of our consideration, as it was not available to r5b instances when we designed and implemented TiDB Cloud. Also, io2 block express was still in preview mode then. The EBS volume io1 has comparable latency with gp2 overall, and io1 provides a higher bandwidth IOPS limit. However, io1 has extra costs based on provisioned IOPS. The EBS volume gp2 has limited bandwidth and IOPS, which are unconfigurable. This brings extra limitations to TiDB. As a result, we chose gp3.
Authors Bio
Bokang Zhang is currently an Infrastructure Engineer at PingCAP. He mainly works on TiKV’s core engine, especially Raft and storage systems. He is also an active maintainer of Titan and TinyKV.
Chenhao Huang is a Developer Relations at PingCAP. He was awarded Ph.D in Computer Science at the University of Sydney in 2022.
){kind=link}